Trabajos documentados para Teoría
Instalación y recursos iniciales
Traslación y rotación
Programación 3D de traslación y rotación
Cinemática Directa
Cinemática Inversa
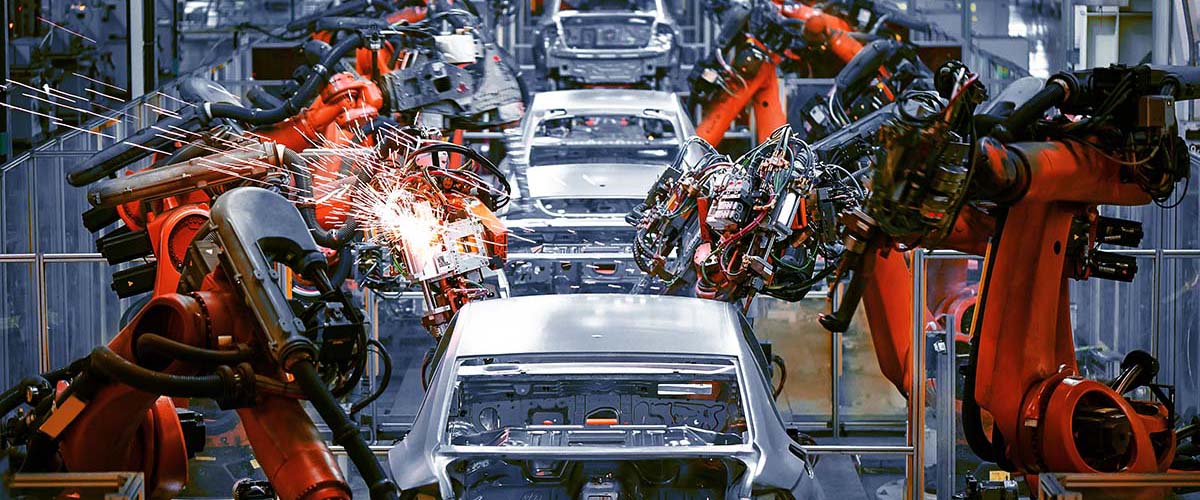
Estudio de robot UR5
Cinemática inversa por métodos numéricos
Cálculo de jacobianas de velocidad
Cálculo de jacobianas de velocidad con Toolbox
Dinámica de robots
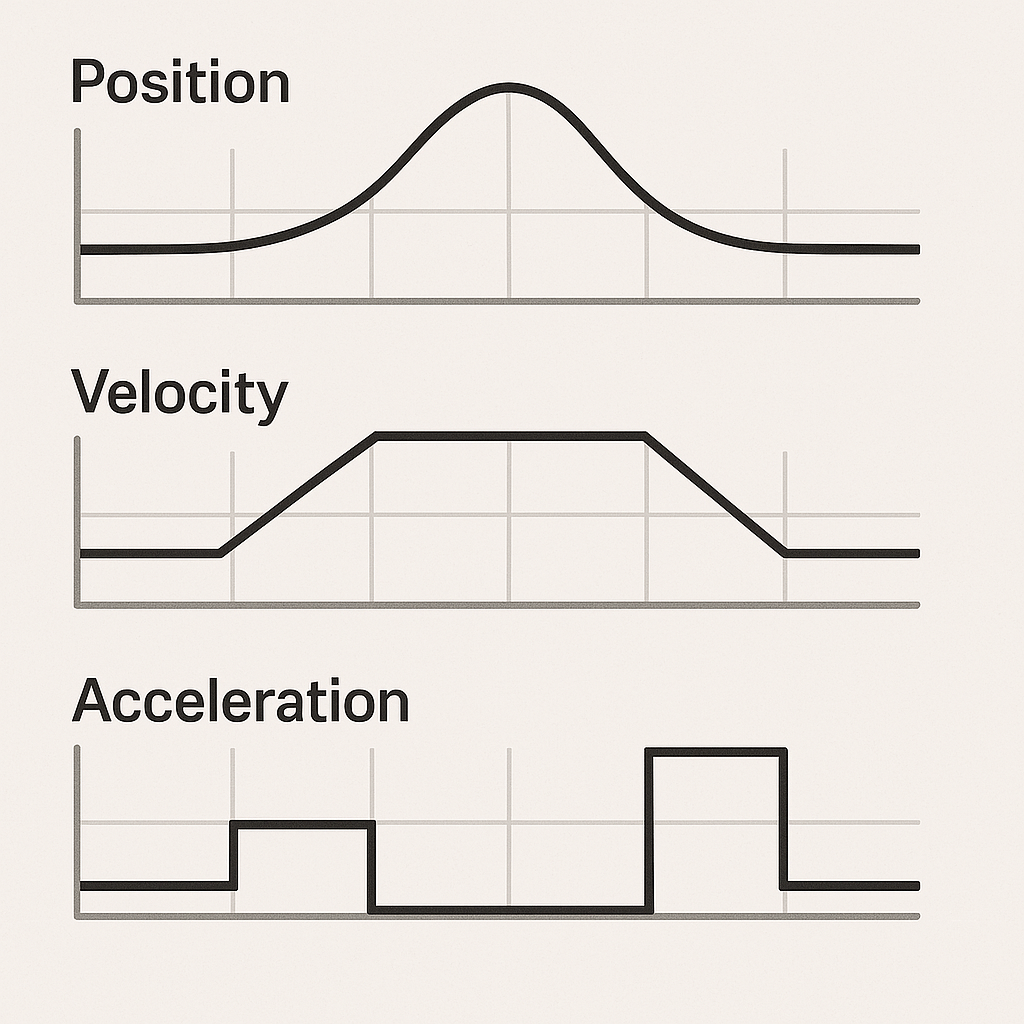
Trayectorias por articulación y lineales
Gráficas de ángulos, velocidad y aceleración
Robot articulado y móvil