Trabajos documentados para Laboratorio
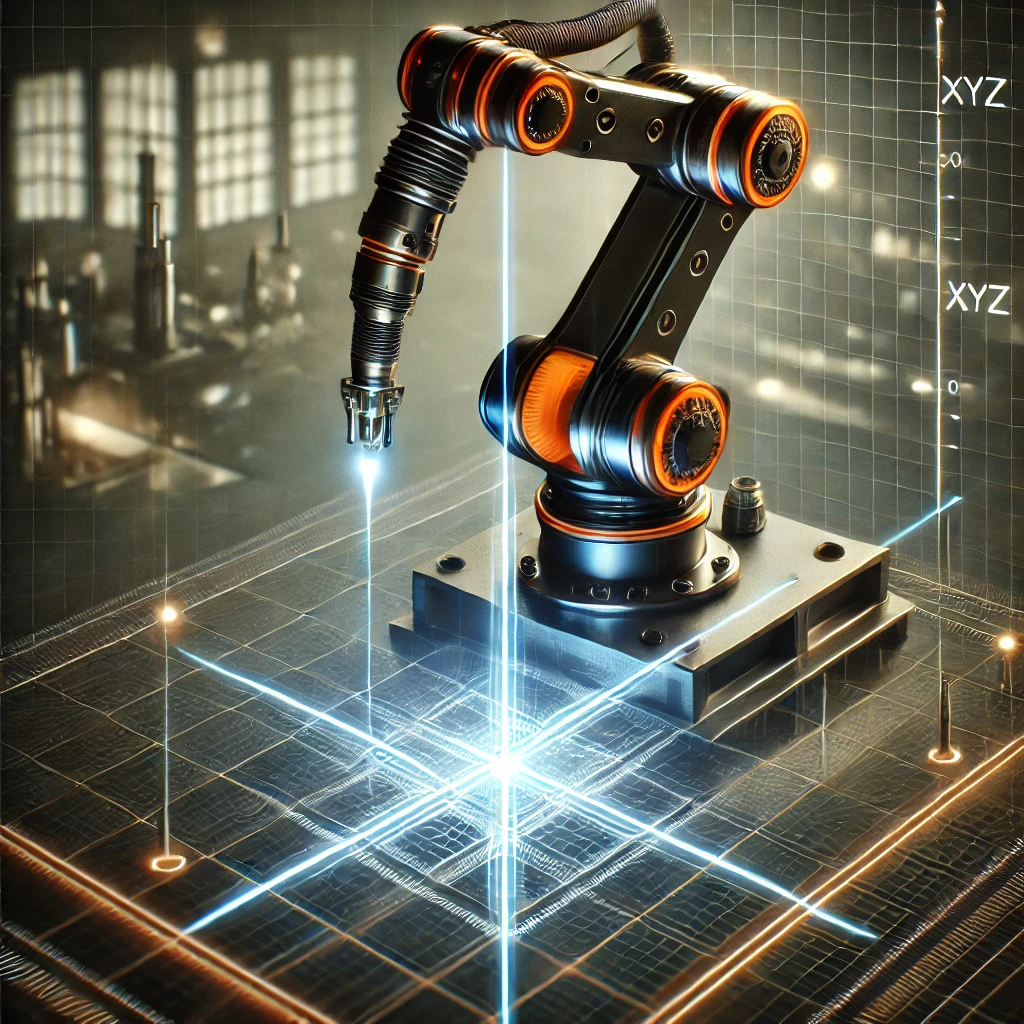
Posicionamiento TCP a 4 Puntos XYZ
Trayectorias lineales, circulares y punto a punto
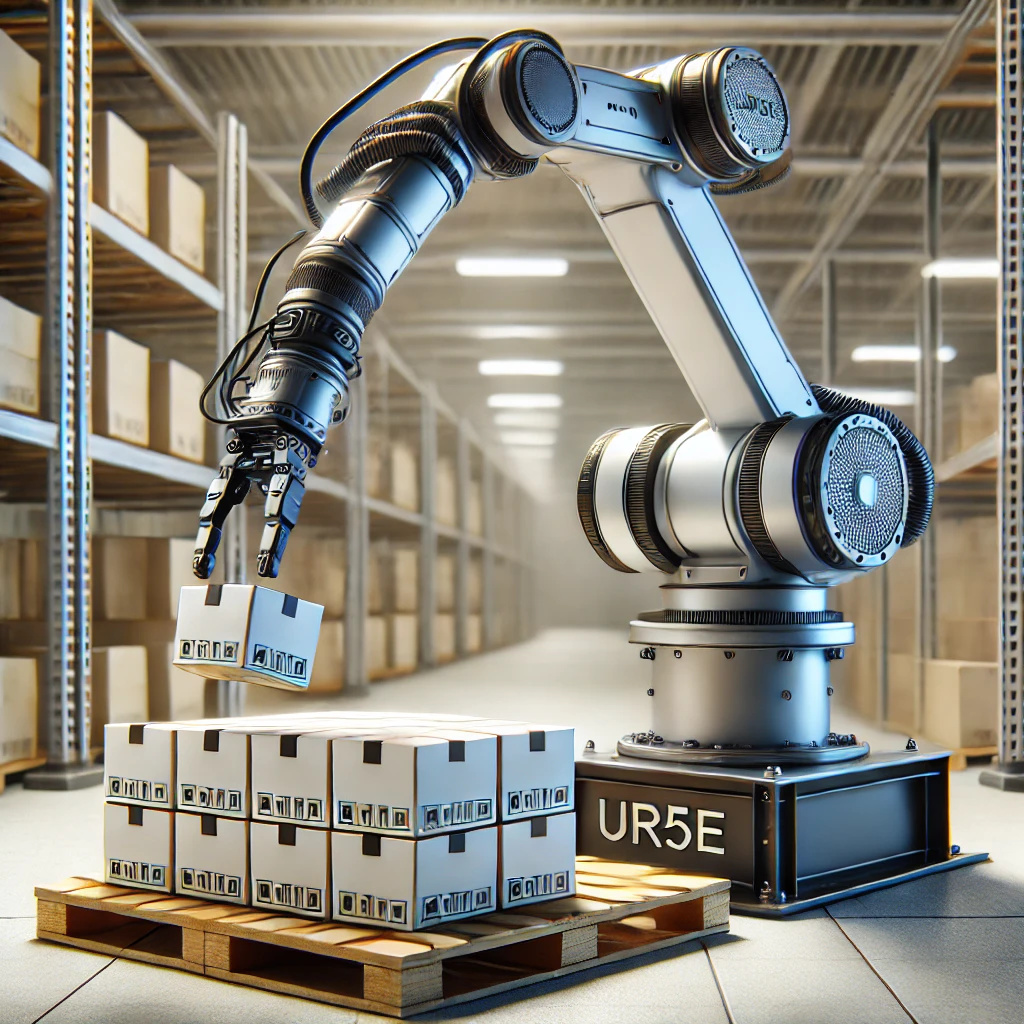
Paletizado y uso de herramientas (I/O) en robot UR5
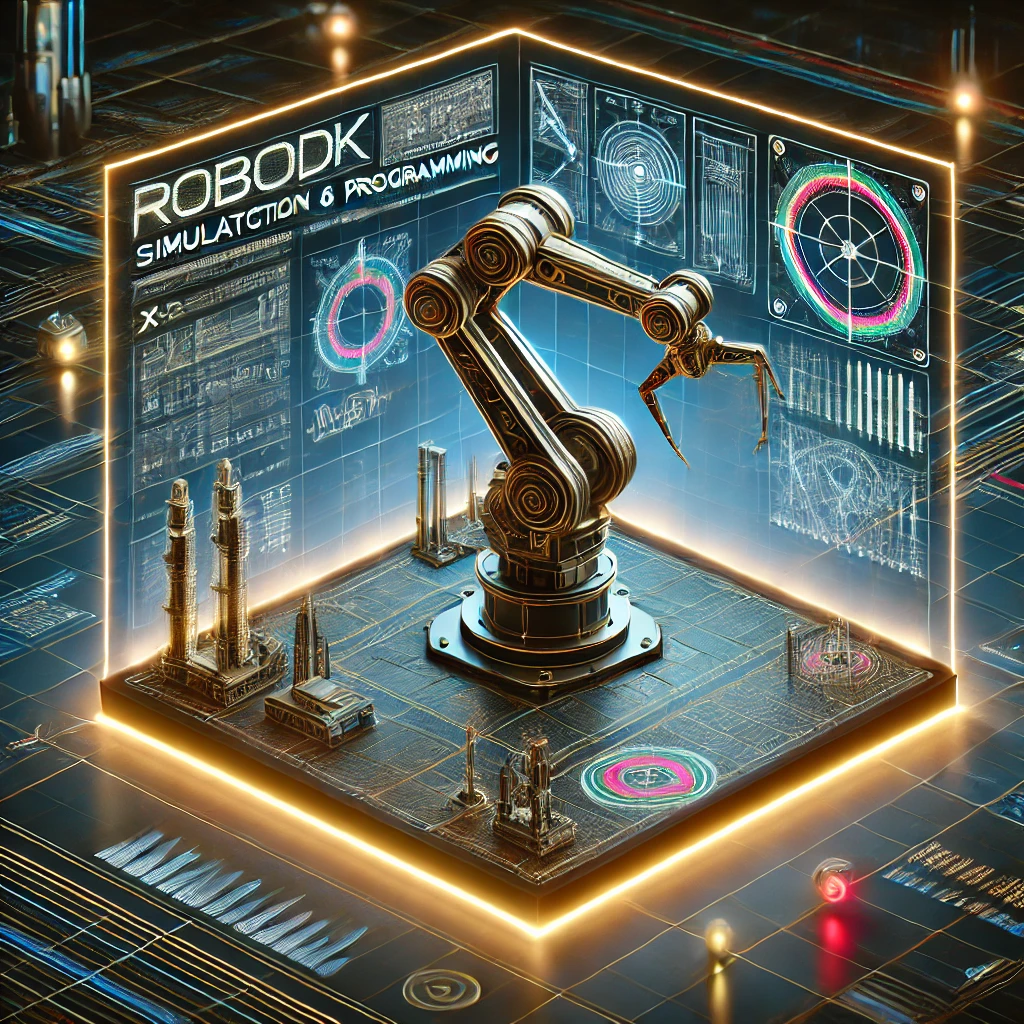
Simulación de robot en RoboDK
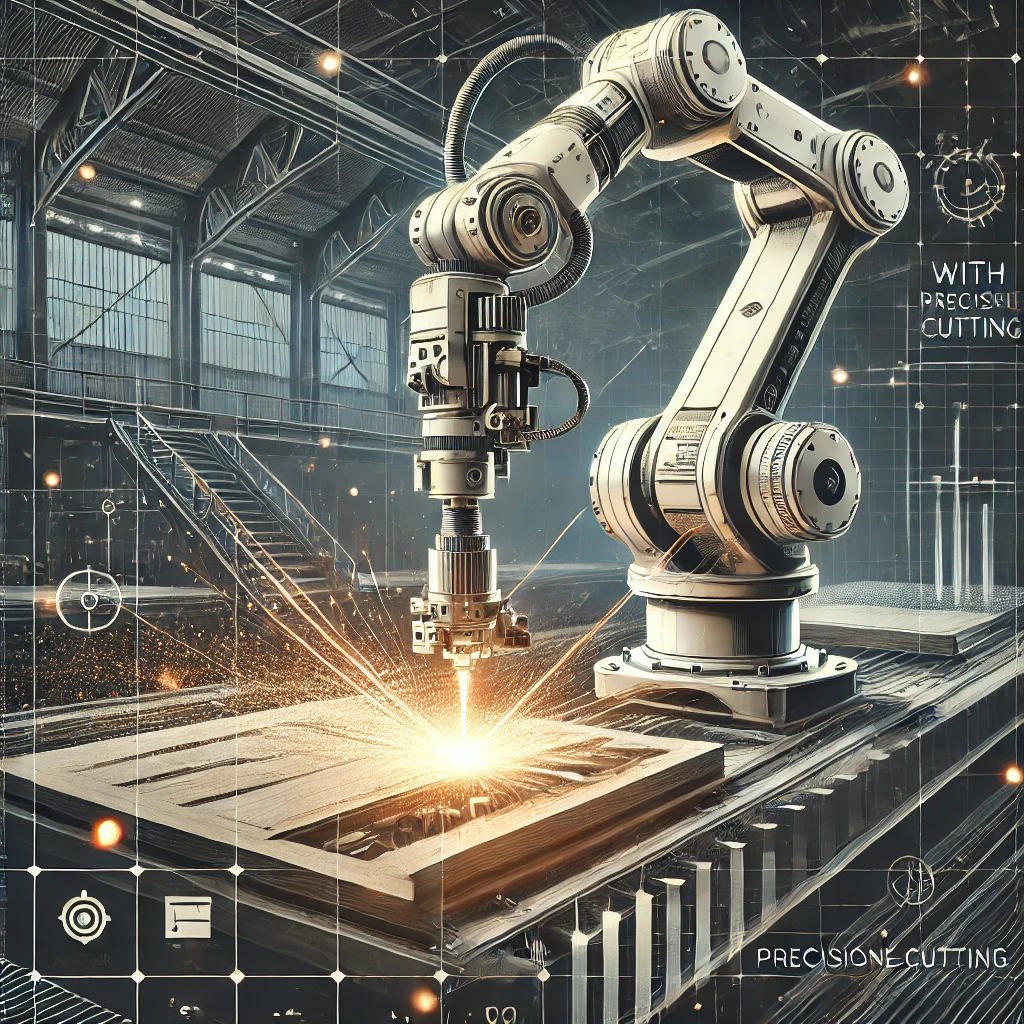
Router en robot KUKA
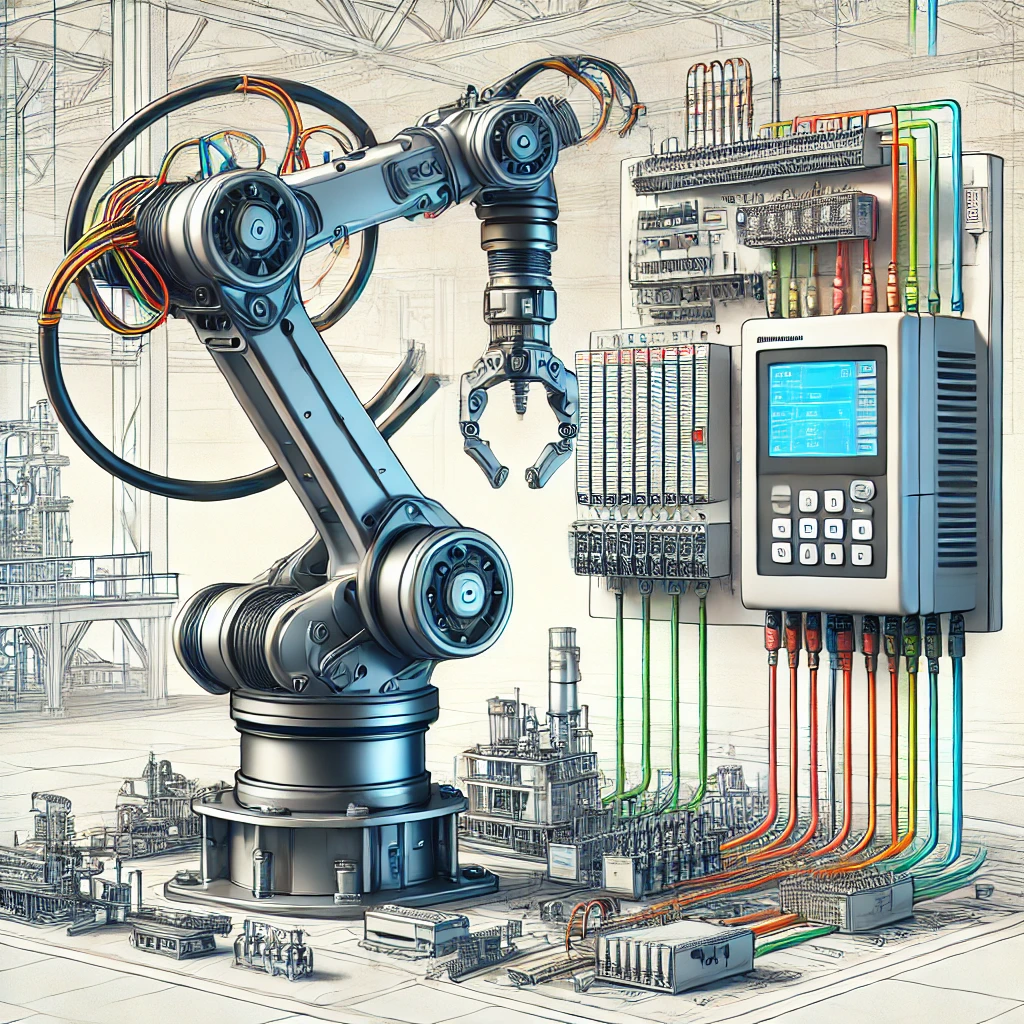
UR5e con PLC Simens S7-1200
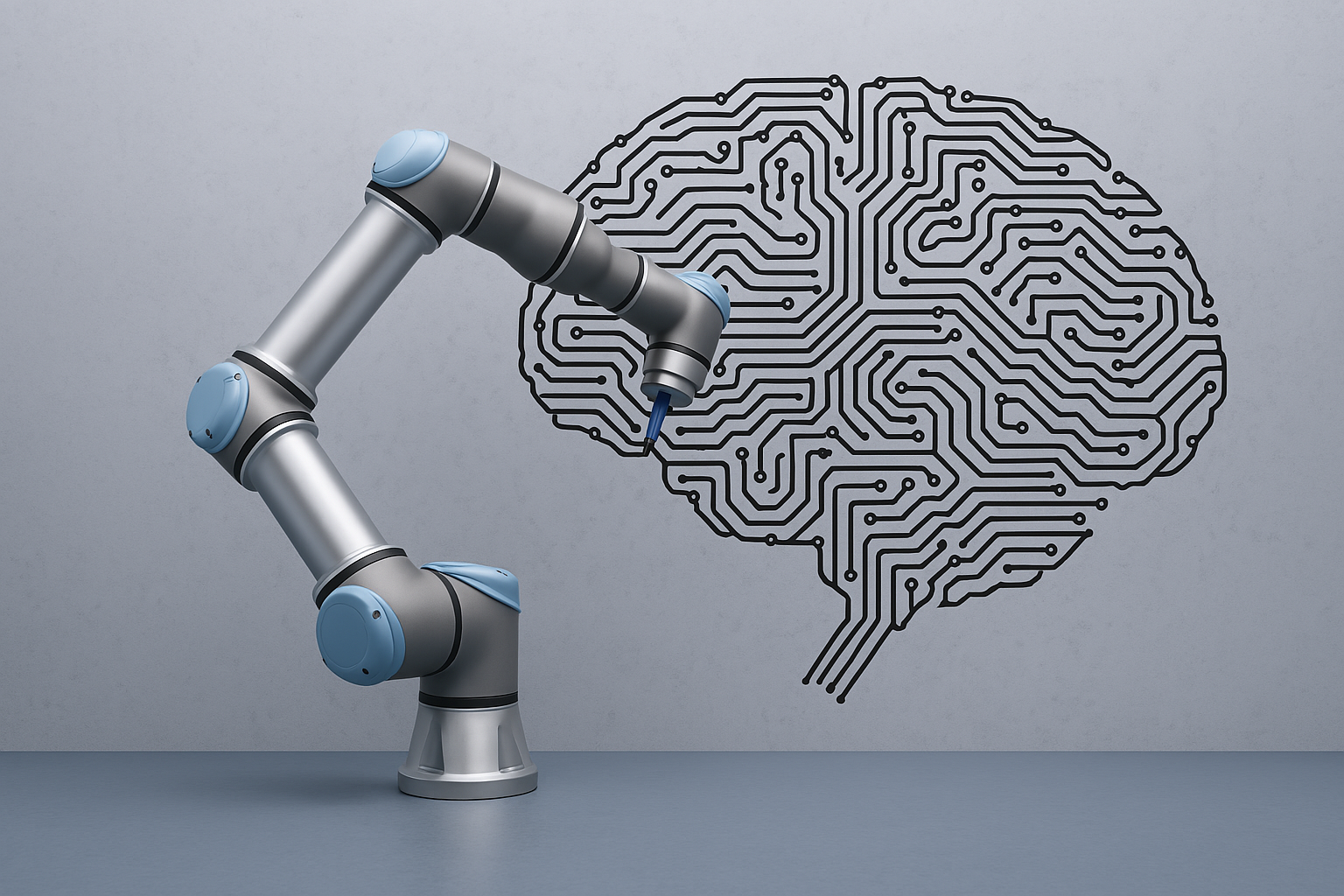
UR5 Artista