Introducción
En esta práctica se utilizó el simulador de RoboDK para emular el trabajo de un robot KUKA KR 16. En este se realizo el corte de un logo mediante el uso de un router.
En esta práctica se utilizó el simulador de RoboDK para emular el trabajo de un robot KUKA KR 16. En este se realizo el corte de un logo mediante el uso de un router.
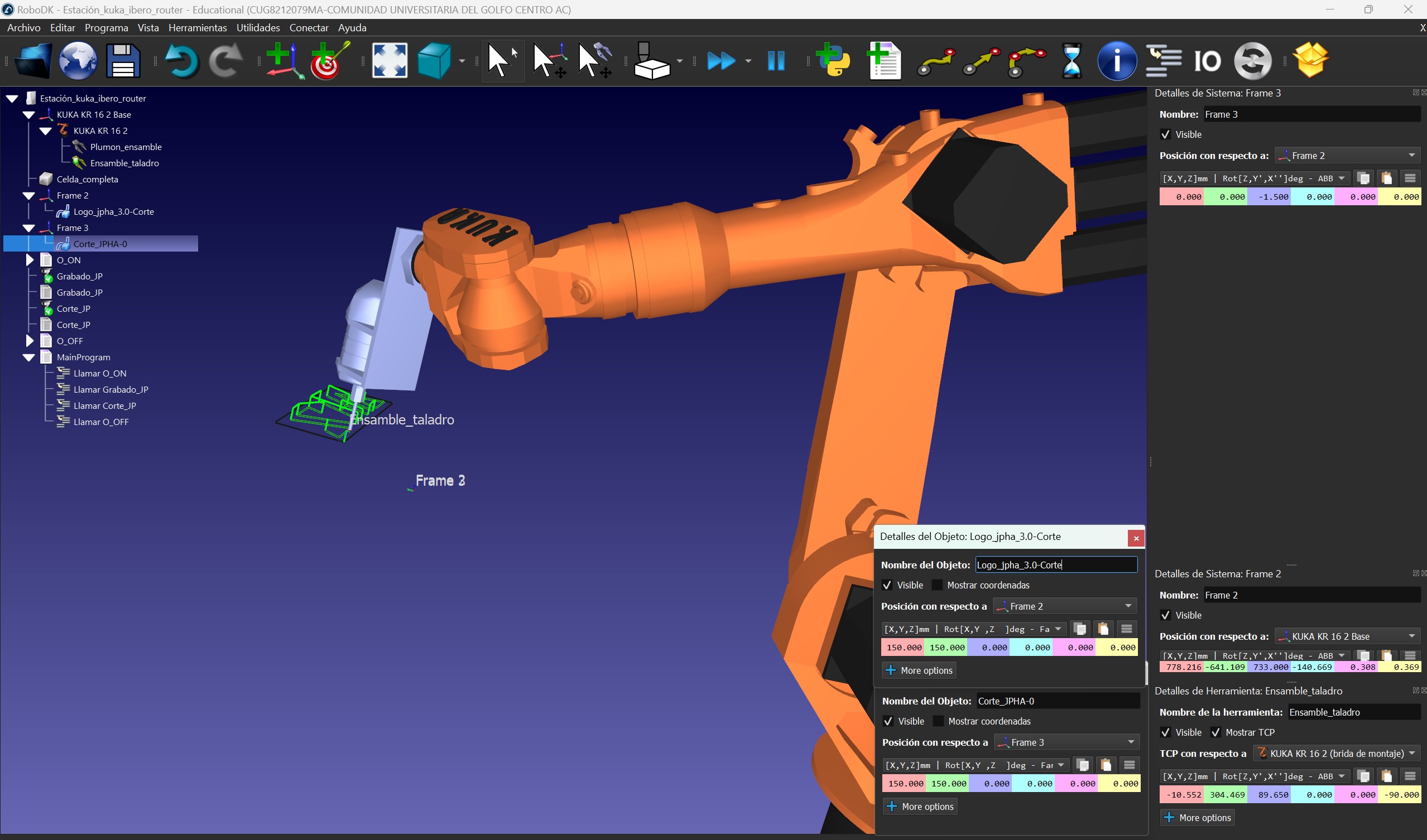
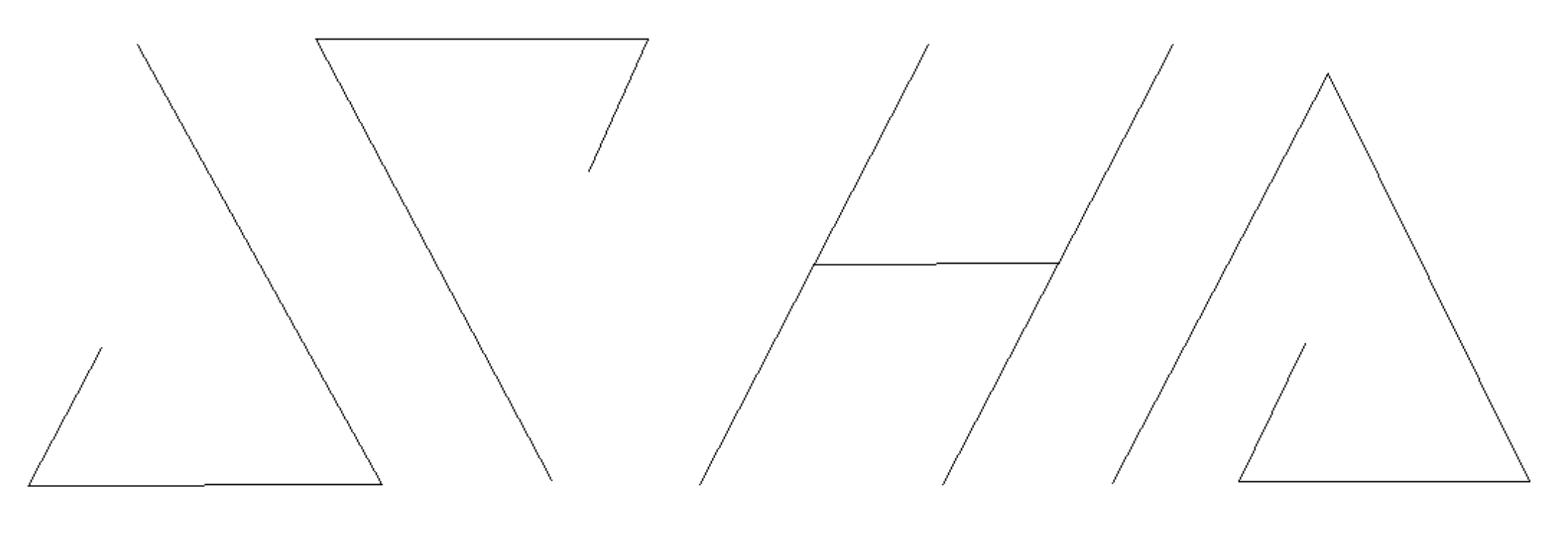
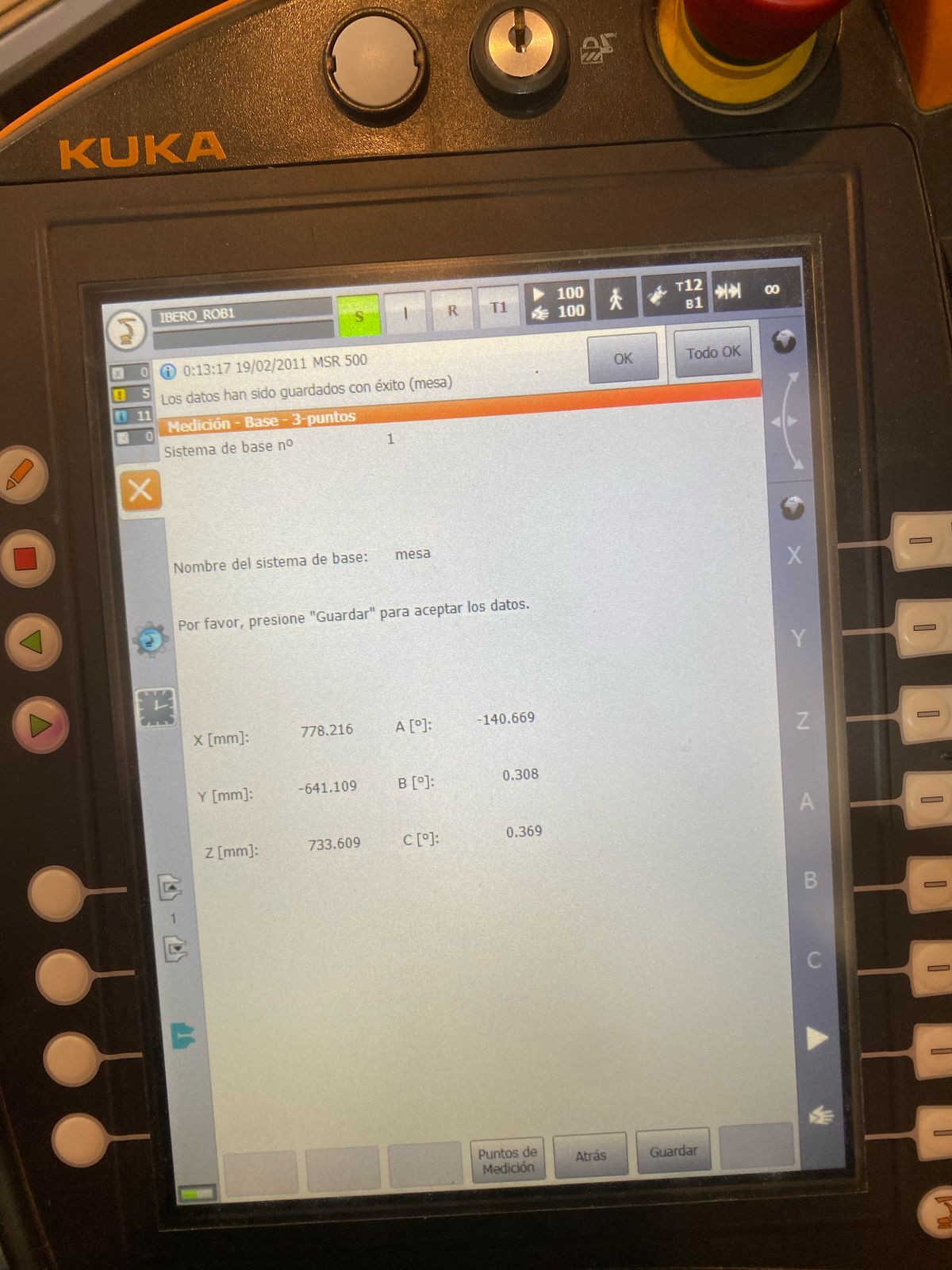
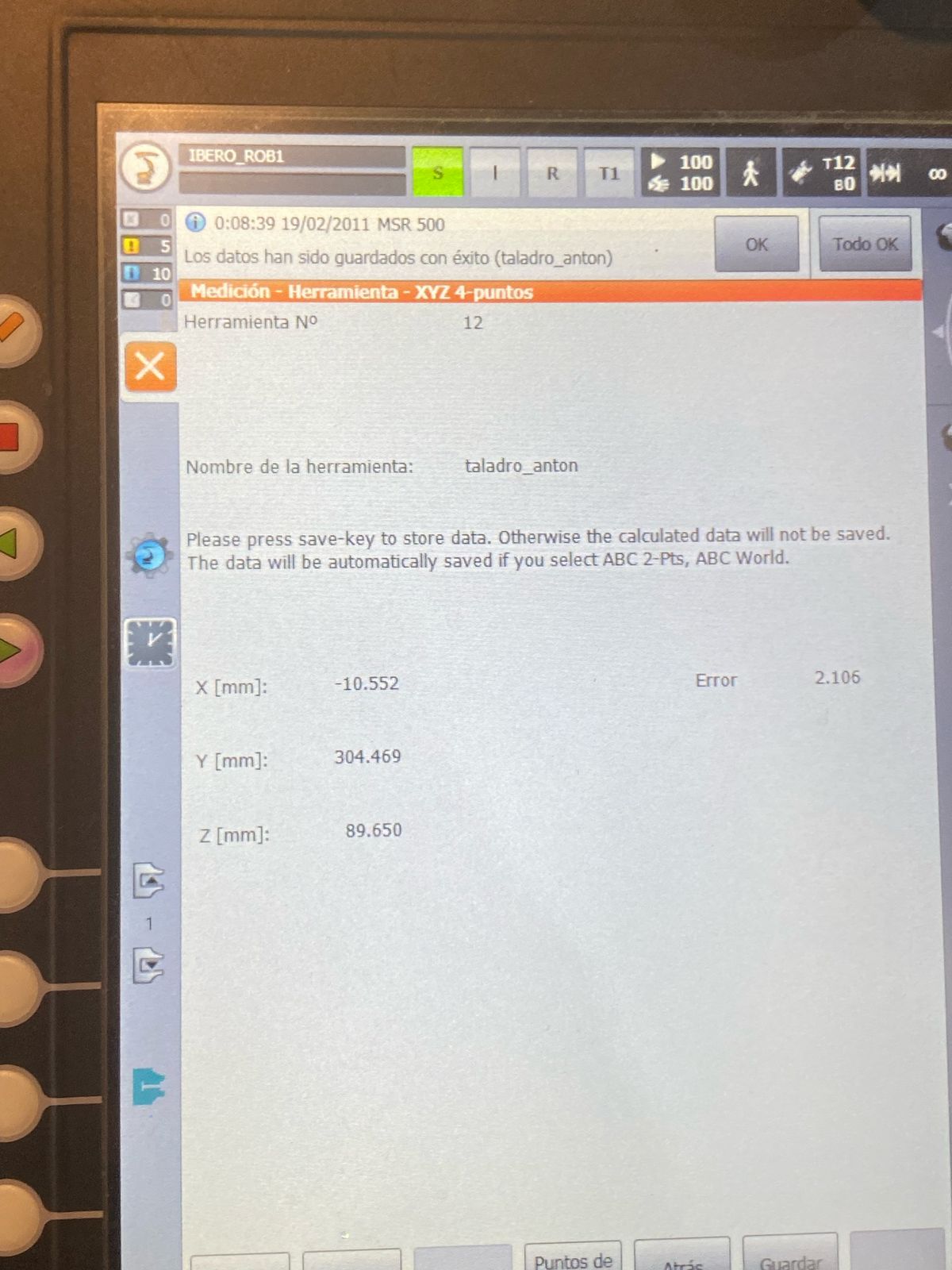
En esta práctica primero se tomaron las medidias de la herremienta a utilizar y se dibujo su CAD; a continuación se montó en el robot y se realizó la calibración de herremienta y de plano de trabajo. Después, se creó la estación de trabajo en RoboDK con los marcos de trabajo y herramienta adecudos, se inserto el logo a trazar y se porgramo un seguimiento de curvas; este programa se exportó y se puso en el robot KUKA para verificar lo que se realizó en la simulación.
Descargar Reporte PDFSe presentan los videos y fotografías como evidencia de la práctica para ver como se especificó la simulación en el programa de RoboDK y su resultado en el robot KUKA.
Programas de descarga: "MainProgram.src" es el programa principal.
MainProgram.src O_ON.src O_OFF.src Corte_JP.src Grabado_JP.srcSe logró simular de forma exitosa el seguimiento de curvas en RoboDK
utilizando el robot KUKA KR 16, lo que permitió comprobar la viabilidad del proceso en un
entorno virtual. Esta simulación no solo evidenció la capacidad del robot para ejecutar
movimientos complejos, sino que también sirvió como un primer paso fundamental en el desarrollo
del programa.
La práctica permitió comprender la importancia de configurar correctamente el TCP y declarar el
espacio de trabajo para lograr trayectorias precisas. Además, la importación y el análisis del
archivo .dxf demostraron ser herramientas efectivas para transformar diseños CAD en movimientos
robóticos, facilitando la integración de elementos gráficos en la programación del robot.
La simulación previa facilitó la detección y corrección de posibles errores, permitiendo
realizar ajustes necesarios sin afectar equipos reales. Este proceso de validación es esencial
antes de implementar el programa en un entorno real, garantizando así la seguridad y la
eficiencia en la operación del robot.