Introducción
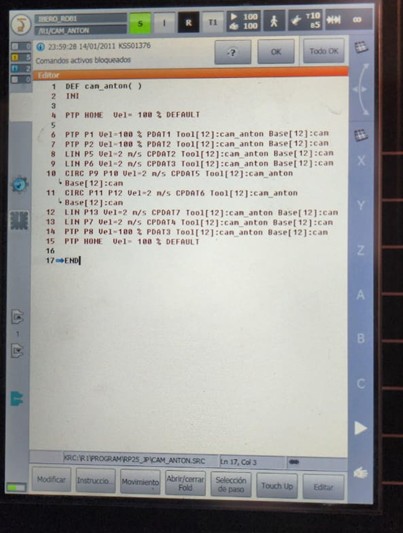
En el presente reporte se documenta el proceso de programación y operación del robot industrial KUKA KR 16R2010-2 para realizar movimientos controlados en diferentes trayectorias (circular, lineal y PTP) y capturar un video mientras sigue el objeto en tiempo real. El objetivo principal es demostrar cómo programar al robot para ejecutar trayectorias predefinidas tras calcular el Tool Center Point (TCP) mediante el método XYZ de 4 puntos. Esta práctica busca desarrollar habilidades en la programación de robots industriales y en la configuración precisa de herramientas, fomentando el aprendizaje en aplicaciones de automatización.