Introducción
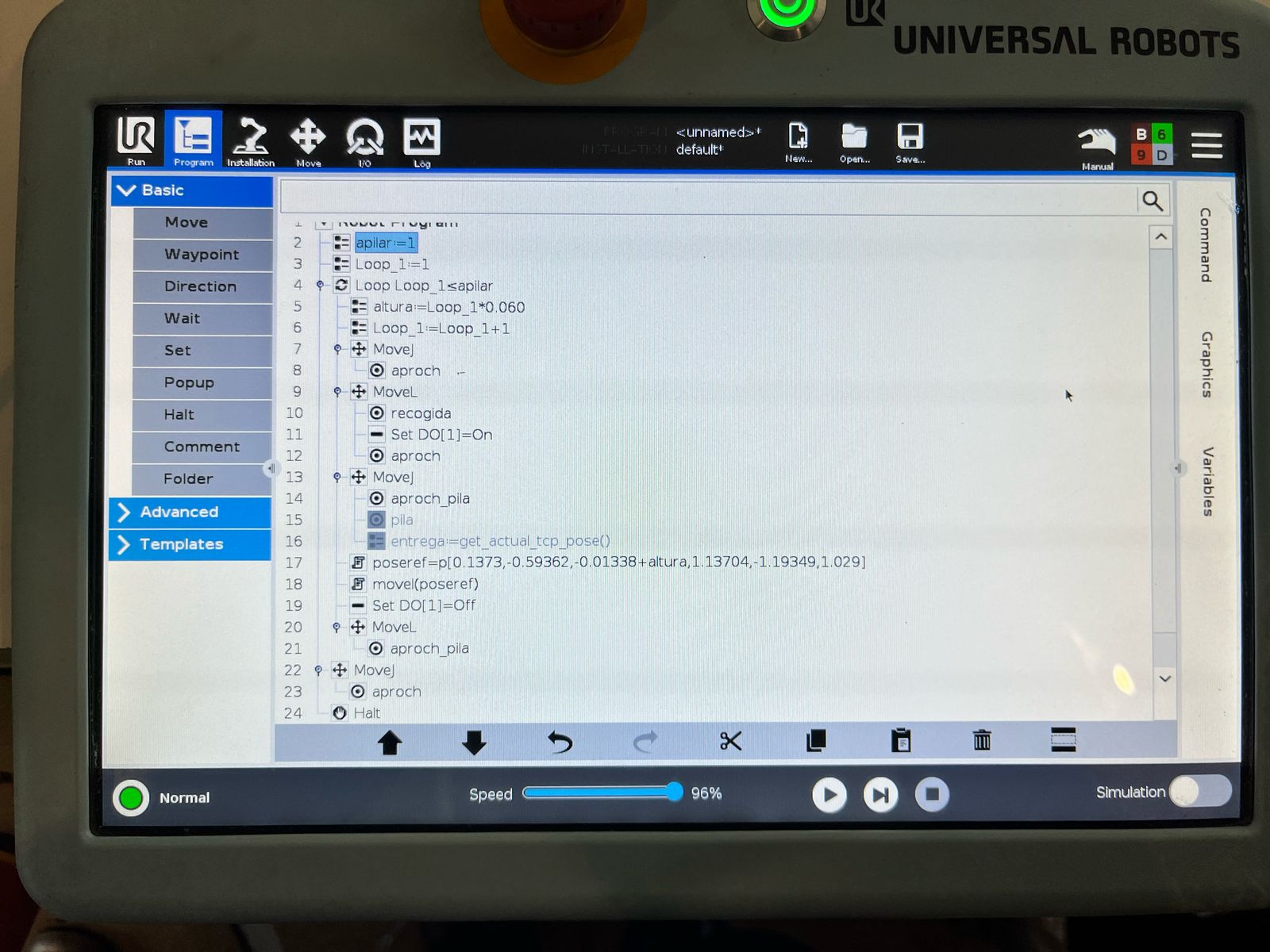
El robot UR5e es un brazo robótico colaborativo diseñado para aplicaciones de automatización industrial, con una capacidad de carga de hasta 5 kg y un alcance de 850 mm. En esta práctica, se implementa la programación del UR5 para el paletizado de pequeñas piezas, en este caso, tres cubos apilados. El objetivo principal es configurar y optimizar el sistema de paletizado utilizando las herramientas de programación del robot, integrando una ventosa conectada mediante una válvula electroneumática controlada por los I/O del robot.