Introducción
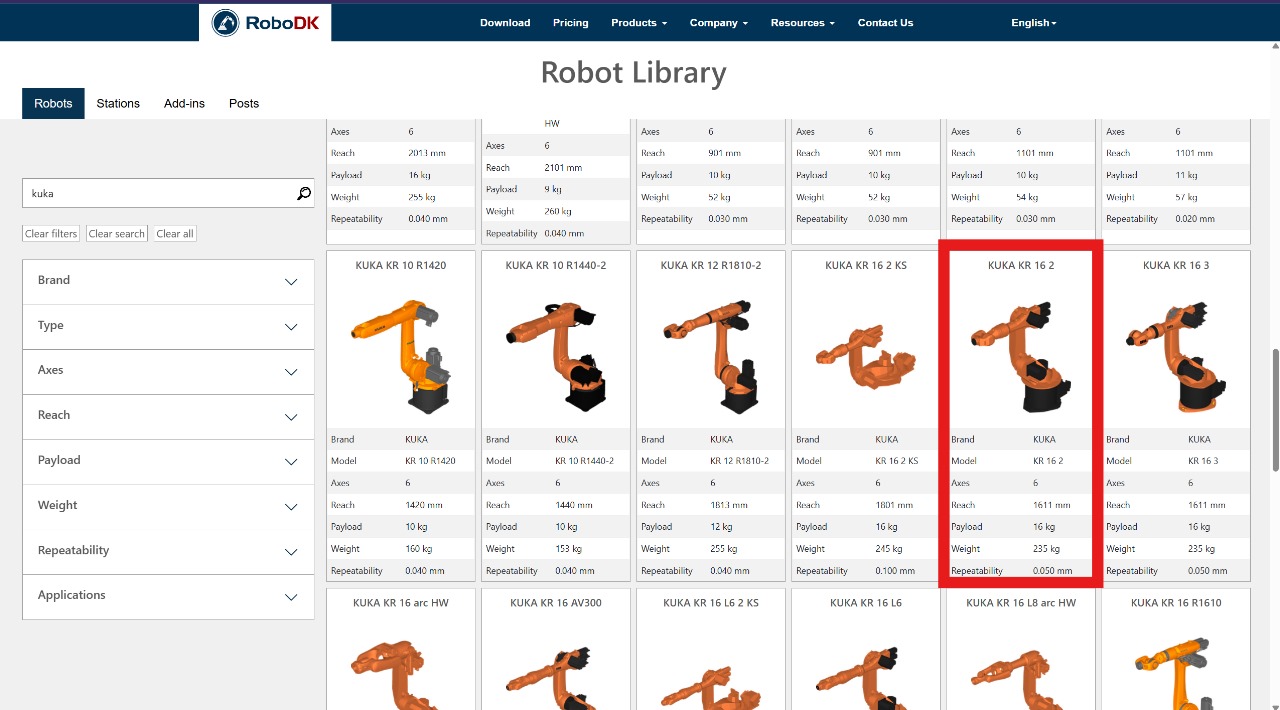
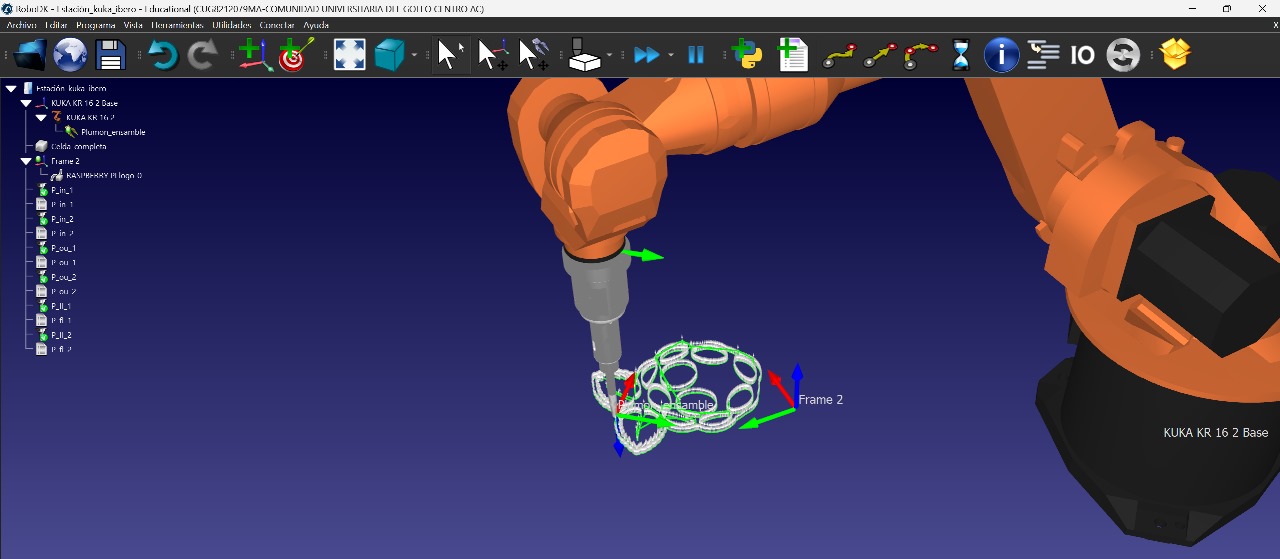
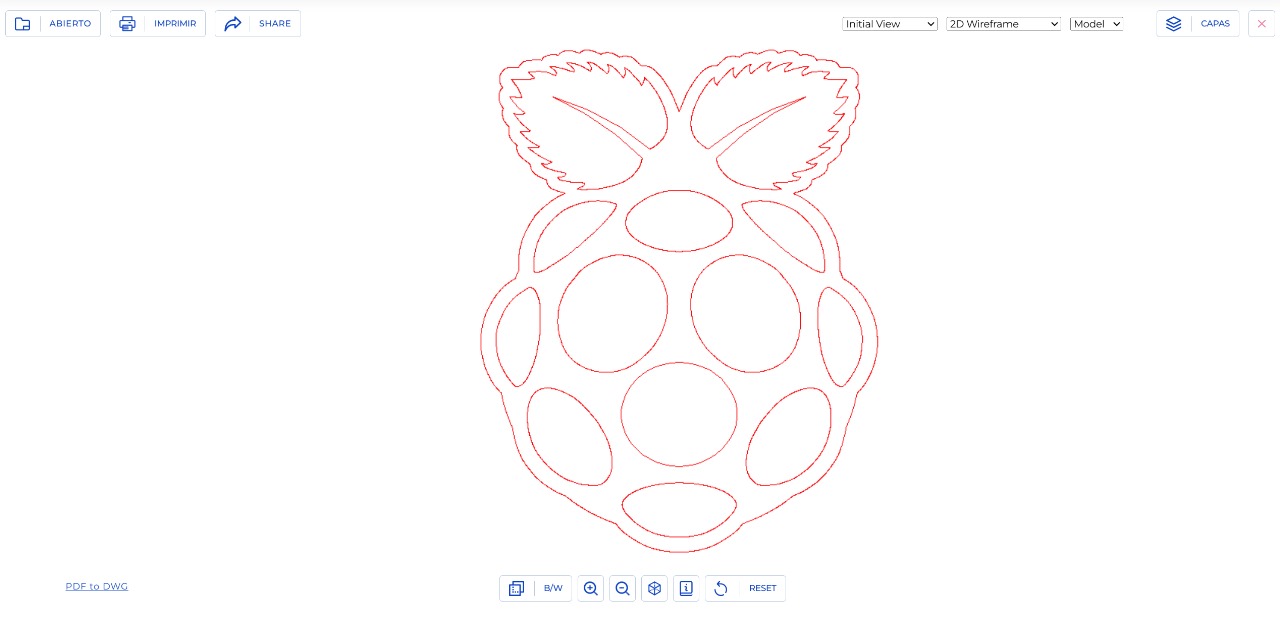
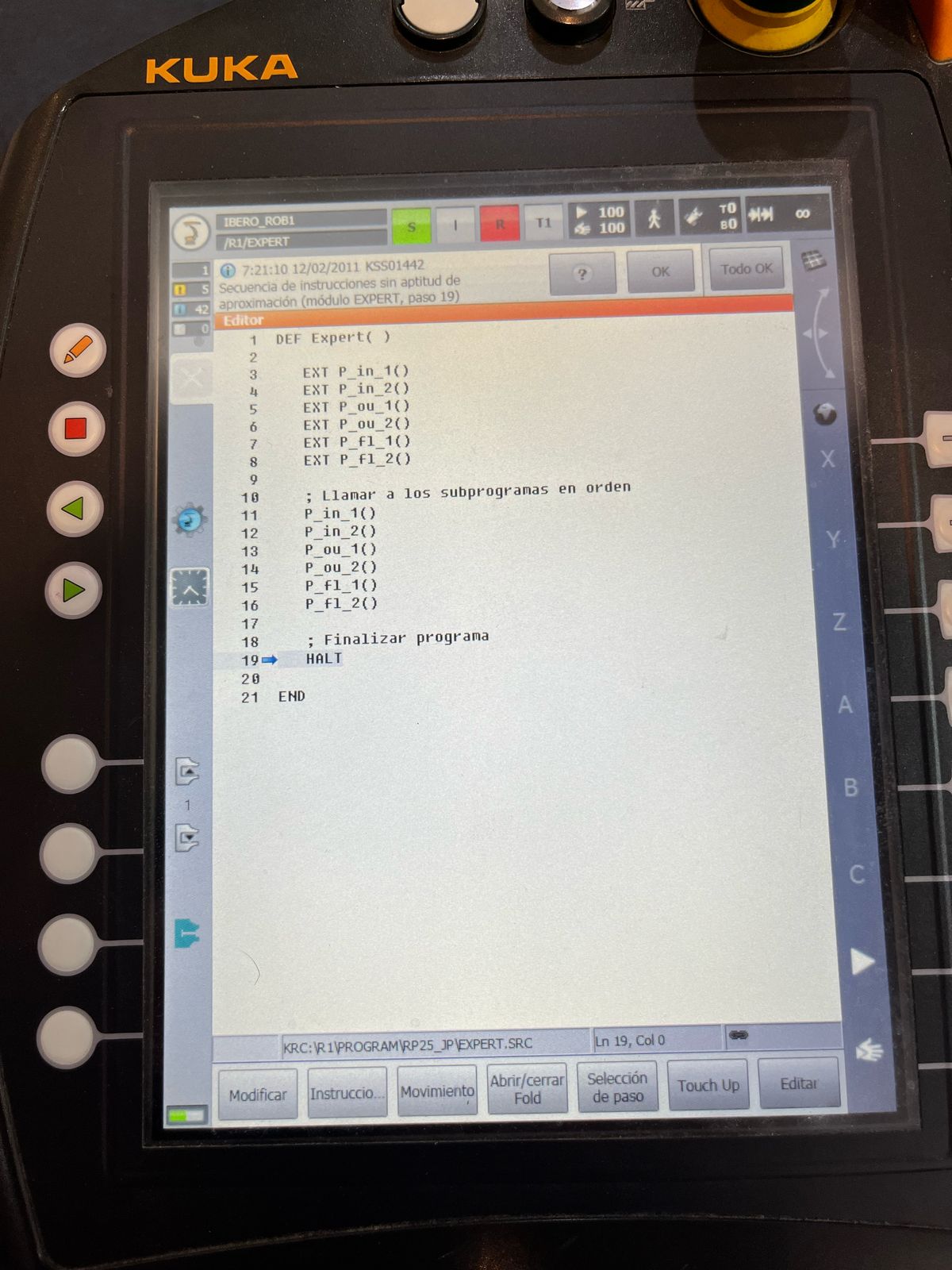
En esta práctica se utilizó el simulador de RoboDK para emular el trabajo de un robot KUKA KR 16. El proceso consistió en diseñar la celda de trabajo, importar un archivo en formato .dxf que contenía el logo a dibujar y, a partir de este, programar el seguimiento de curvas para reproducir el dibujo en un pizarrón. El objetivo principal fue aprender a seleccionar y configurar un robot, declarar correctamente la herramienta (TCP) y el espacio de trabajo, y desarrollar un programa de trayectoria que, tras ser exportado, se pueda cargar en el robot para comprobar su correcto desempeño.